近日,云海时空团队在机器人领域取得重大突破,两项研究成果《MoD-SLAM: 用于无界三维场景重建的单目稠密建图方法》(MoD-SLAM: Monocular Dense Mapping for Unbounded 3D Scene Reconstruction)和《DDN-SLAM: 实时稠密动态神经隐式SLAM系统》(DDN-SLAM: Real-time Dense Dynamic Neural Implicit SLAM)成功发表在国际机器人领域权威期刊《IEEE Robotics and Automation Letters》上,并分别入选2025年国际机器人顶级会议ICRA和IROS,标志着我国在同步定位与建图(SLAM)领域取得重大进展,为自动驾驶、增强现实等产业提供了全新解决方案。
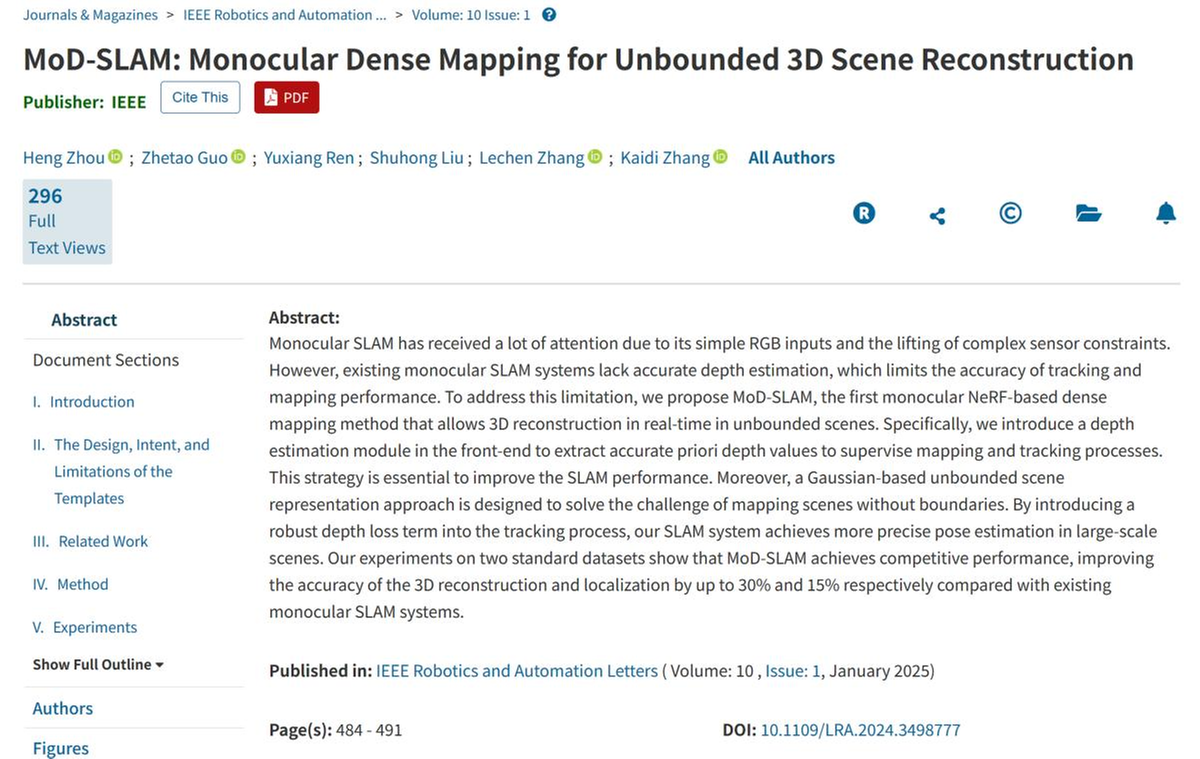
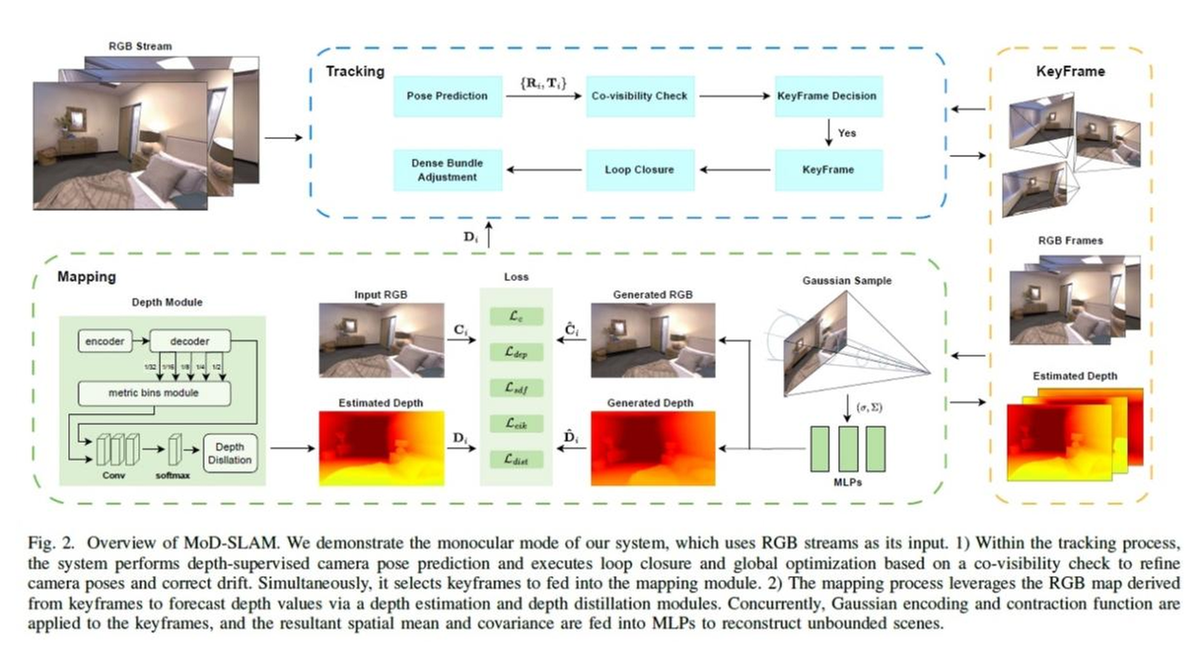
MoD-SLAM研究旨在解决现有单目视觉同步定位与建图(SLAM)系统在大型、无界场景下精度不足的问题。该方法首次提出了基于神经辐射场(NeRF)的单目稠密映射技术,实现了实时的无界场景三维重建。通过创新性地引入深度估计模块与高斯场景表示法,大幅提高了SLAM系统的追踪和建图精度,在三维重建和定位精度方面分别提高了30%和15%,对于无人驾驶、增强现实(AR)和无人机导航等实际应用具有重大意义。
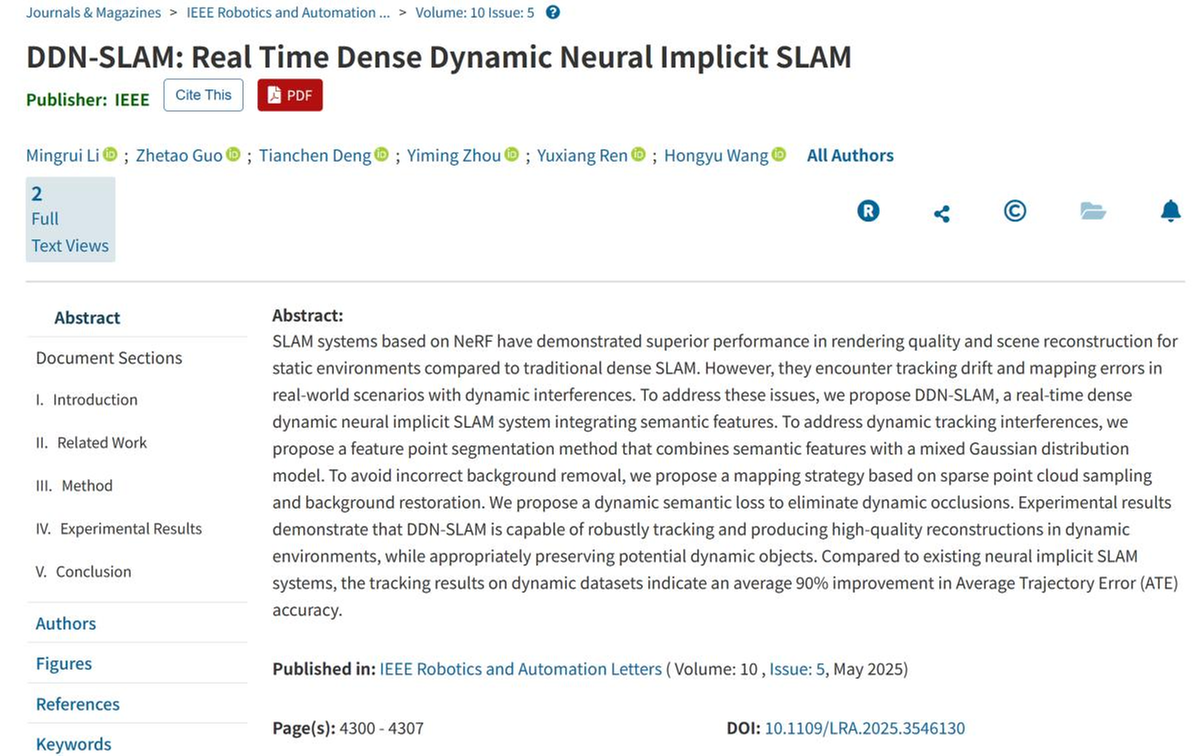
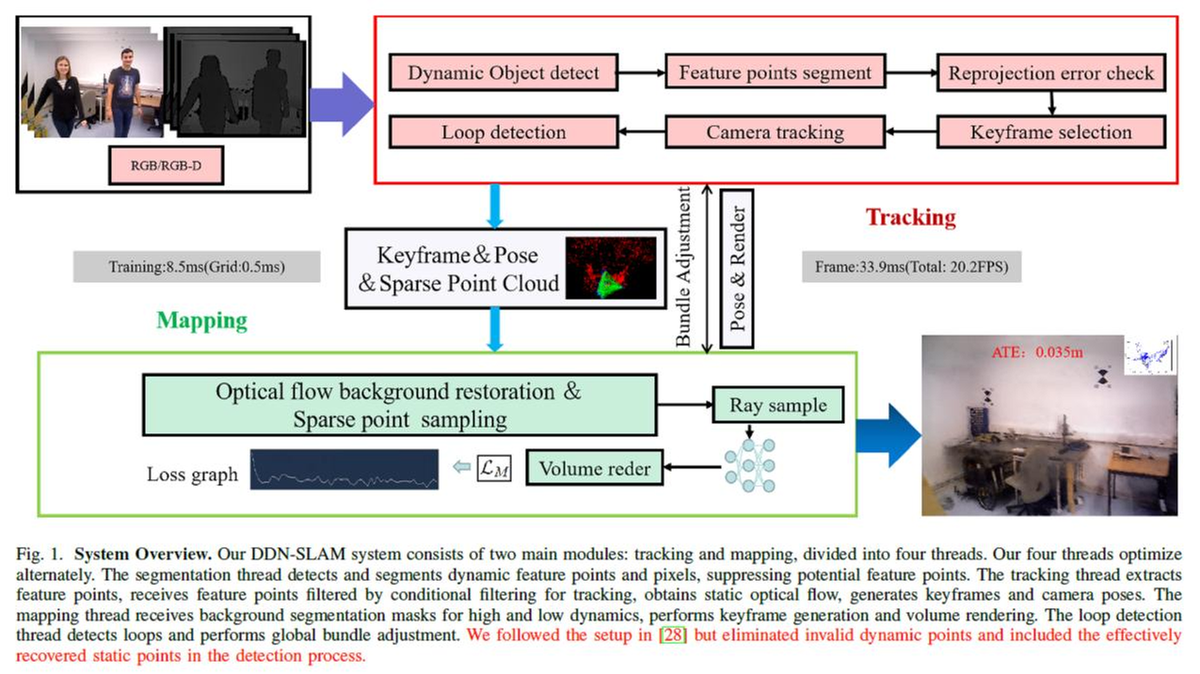
DDN-SLAM研究则针对动态复杂场景下传统神经隐式SLAM系统存在的追踪漂移和映射误差问题,创新性地提出一种实时稠密动态神经隐式SLAM系统。该系统融合语义特征和混合高斯分布模型实现特征点分割,通过稀疏点云采样与背景恢复策略避免了错误的背景去除,并提出动态语义损失以有效消除动态遮挡。实验结果显示,DDN-SLAM系统在动态环境中能够稳定地进行追踪,重建质量显著提升,追踪误差相较现有方法降低90%,有望广泛应用于机器人导航和自动驾驶领域。
本研究由云海时空团队联合美国哥伦比亚大学、日本东京大学和大连理工大学共同完成,是一项产学研合作的典范,显示了云海时空团队在全球范围内的学术影响力。研究成果引发全球学术界高度关注,麻省理工学院(MIT)感知科学实验室主任评价:“这两项工作重新定义了开放环境下的机器感知范式”。目前,团队正与斯坦福大学动态视觉实验室共建联合实验室,并牵头制定《动态环境SLAM性能评估》国际标准,进一步彰显其在全球智能感知领域的引领地位。
针对此次研究成果,云海时空创始人兼CEO郭哲滔在接受采访时表示:“我们一直致力于推动机器人视觉和人工智能技术的创新与应用。这次的研究成果不仅仅是技术突破,更是团队多年积累与协作的结晶。未来,我们将持续加强研发投入,进一步推进技术落地,助力我国人工智能与机器人产业的全球领先地位。”
云海时空团队此次研究成果的成功发表,不仅标志着团队在机器人视觉领域的技术领先地位,也为推动中国机器人技术的自主创新和国际竞争力的提升做出了积极贡献。这些先进技术的应用将进一步推动我国在人工智能和机器人产业的快速发展,促进相关产业链的完善与升级,有助于我国实现高质量发展和科技强国的战略目标。